Unit 9: actions and consequences; reinforcement learning

reinforcement learning in motor and other tasks
- A closer look at motor learning
- Classes of control
- From error-based to reinforcement learning
- Representations in reinforcement learning. The Credit Assignment
Problem
- Hierarchical RL
levels of understanding of motor learning (after Wolpert, 2011)
- The task components that must be
learned for skilled performance, including:
- efficient gathering of task-relevant sensory information;
- selection strategy;
- decision making;
- balancing predictive and reactive control.
- The learning processes that apply to these components:
- how errors and rewards drive learning;
- what are the representations involved and how they are
modified;
- how credit is assigned and how learning generalizes to novel
situations.
- the neural mechanisms of motor learning and memory,
including:
- the circuits involved;
- synaptic modification.
classes of control
In general, optimizing motor performance is achieved through
three classes of control:
-
predictive or feedforward control, which is critical given the
feedback delays in the sensorimotor system;
-
reactive or feedback control, which involves the use of
sensory inputs to update ongoing motor commands; and
-
biomechanical control, which involves modulating the
compliance of the limb.
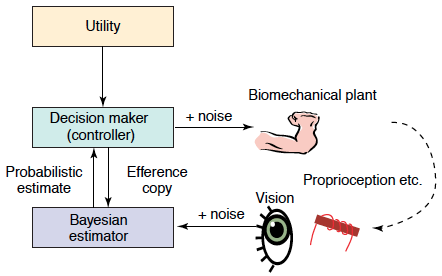
[EXTRA] The Bayesian framework has many uses
in sensorimotor learning. Sensory integration. Multiple
streams of sensory information, within and across modalities (for
example, visual and tactile inputs), can be optimally combined to
achieve estimates that reduce the effects of noise. This integration
process can take into account the properties of external objects,
such as tools, so that the visuo-haptic integration is optimal even
when the tactile input comes through a hand-held tool. Learning
priors. By learning the statistical distribution of possible
states of the world, the estimate can be further
refined. Developing and using internal models. By combining
these processes with internal models of the body that map the motor
commands (as signalled through the efference copy) into the expected
sensory inputs, Bayesian inference can be used to estimate the
evolving state of our body and the world.
learning from one's errors
Error-based learning is the key process in many well-studied
ADAPTATION paradigms, including
- prism adaptation,
- saccade adaptation,
- reaching in force fields,
- visuomotor adaptation,
- grip force adaptation.
A common feature across these different task domains:
The system can — and will — learn from an error in a single
trial.
Thus, adaptation is observable even when all perturbations are
random (that is, unexpected) and the subject is told not to adapt.
from error-based to reinforcement learning
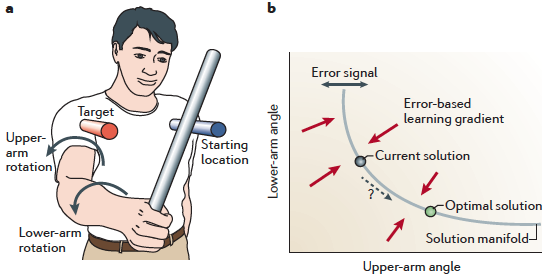
(a) A simple redundant task in which a target has to be reached
with a stick using two effectors: shoulder and arm, whose rotations
together contribute to a combined outcome.
(b) Many combinations of the two rotations will on average produce
the correct solution. The locus of these is the solution
manifold; the error signal corresponds to deviations from it (blue double arrow).
- For error-based learning to occur, the system needs to apportion the
error to each of the two effectors, by following the error-based
learning gradient (red arrows).
-
However, to find a less variable or less effortful 'optimal' solution
(green circle) along the solution manifold
(direction shown by a dashed arrow), other learning mechanisms, such as
reinforcement learning (RL), are needed.
In contrast to an error signal, reinforcement signals — which can be as
simple as "success" or "failure" — do not give information about the
required control change. Thus, the learner must explore the possibilities to
gradually improve its motor commands. Like error-based learning,
RL can also be used to guide learning towards the solution
manifold. However, because the signal (the reward) provides less
information than in error-based learning (the vector of errors), such
learning tends to be SLOW.
representations (models) in reinforcement learning
Information obtained during a single movement is often too
sparse or too noisy to unambiguously determine the source of the
error. Therefore, it underspecifies the way in which the
motor commands should be updated, resulting in an inverse problem (differences in control uniquely specify
differences in outcome, but not vice versa).
To resolve this issue, the system does not start from a blank
slate. Instead, it uses models of the task: representations that reflect its
assumptions about the task structure and that constrain error-driven
learning. Such models can be mechanistic or normative.
Mechanistic models specify the representations and learning
algorithms directly. In this framework, representations are often
considered to be based on motor primitives (the neural building blocks out
of which new motor memories are formed; cf. synergies illustrated in
slides 9—11).
Normative models specify optimal ways for the learner to adapt when
faced with errors. A
normative model includes two key components:
- a GENERATIVE MODEL of the situation, which specifies how different
factors, such as tools or levels of fatigue, influence performance;
- a prior distribution, which states how these factors are likely to
vary over space and time.
mechanistic models: motor primitives and structural learning
Motor primitives can be thought of as neural control modules that can be
flexibly combined to generate a large repertoire of behaviors. For
example, a primitive might represent the temporal profile of a particular
muscle activity. The overall motor output will be
could be the sum of all
primitives, weighted by the level of the activation of each module. The
makeup of the population of such primitives then determines which
structural constraints are imposed on learning.
Several recent models have been developed to account for the reduction in
interference in the presence of contextual cues. These models propose
multiple, overlapping internal representations that can be selectively
engaged by each movement context.
A general underlying principle of what can or cannot serve as a
contextual switch has NOT been identified.
[Compare the Frame
Problem that arises in connection with knowledge representation and truth maintenance.]
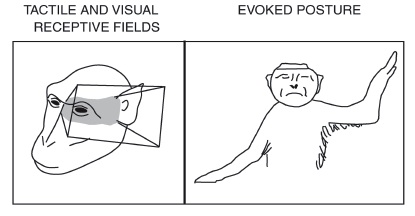
motor primitives: synergies in monkey motor cortex
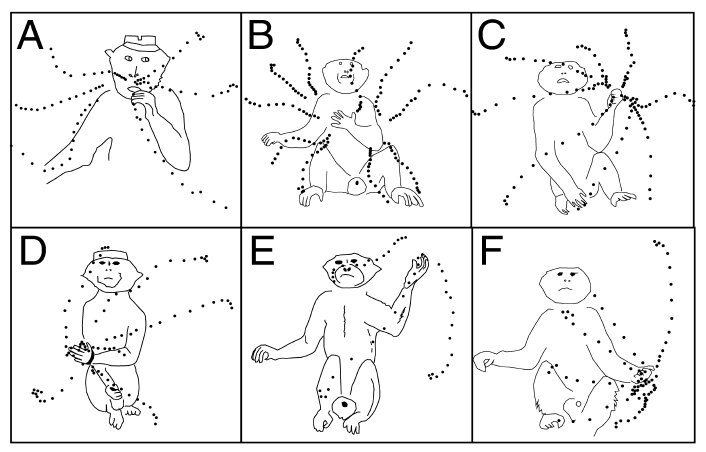
Motor control is HIERARCHICAL: some of the primitives
(units) of action that it involves are very high-level.
The illustration shows the postural MOVEMENT
SYNERGIES evoked by stimulating single neurons in
monkey precentral gyrus (from Graziano et al., 2002).
synergies in ant motor control

The zombie ant phenomenon shows what happens when motor/action synergies are hijacked.
normative models: the credit assignment problem
Within the normative framework, the process of motor [or any other kind of] learning can be
understood as a credit assignment problem (see Marvin Minsky's 1960
paper where it is first stated): how to attribute an error
signal to the underlying causes.
For example, if a tennis player starts hitting shots into the net on the
serve, the problem could be that the ball was not thrown high enough,
was hit too early, that the racquet strings are loose or that he or she is
fatigued. If the racquet dynamics have changed, the player would do well
to learn these dynamics and remember them for the next time that they
use this particular racquet. Conversely, if the player is simply tired, the
necessary adjustments should only be temporary but should be applied
even if the racquet is changed at that moment.
Two types of credit assignment can be distinguished:
- contextual/structural;
- temporal.
from motor control to general decision-making (Dayan & Niv, 2008)
Like motor control, general decision making environments are characterized by:
-
a STATE SPACE (states are such things as locations in a maze or board
positions in a game);
-
a set of actions (directions of travel, moves on a board);
-
affectively important outcomes (finding cheese, obtaining water,
winning).
Actions can move the decision-maker from one state to another and they can
produce outcomes.
The outcomes are assumed to have numerical (positive or negative)
UTILITIES, which can change according to the motivational state of the
decision-maker (e.g. food is less valuable to a satiated
animal).
Typically, the decision-maker starts off not knowing the rules of the
environment (the state transitions and outcomes brought about by the
actions), and has to learn or sample these from experience.
an example of a STATE SPACE: the Towers of Hanoi problem
|
|
|
The 3-disk version of the Towers of Hanoi problem...
|
...and its STATE SPACE.
|
model-free compared to model-based RL (Dayan & Niv, 2008)
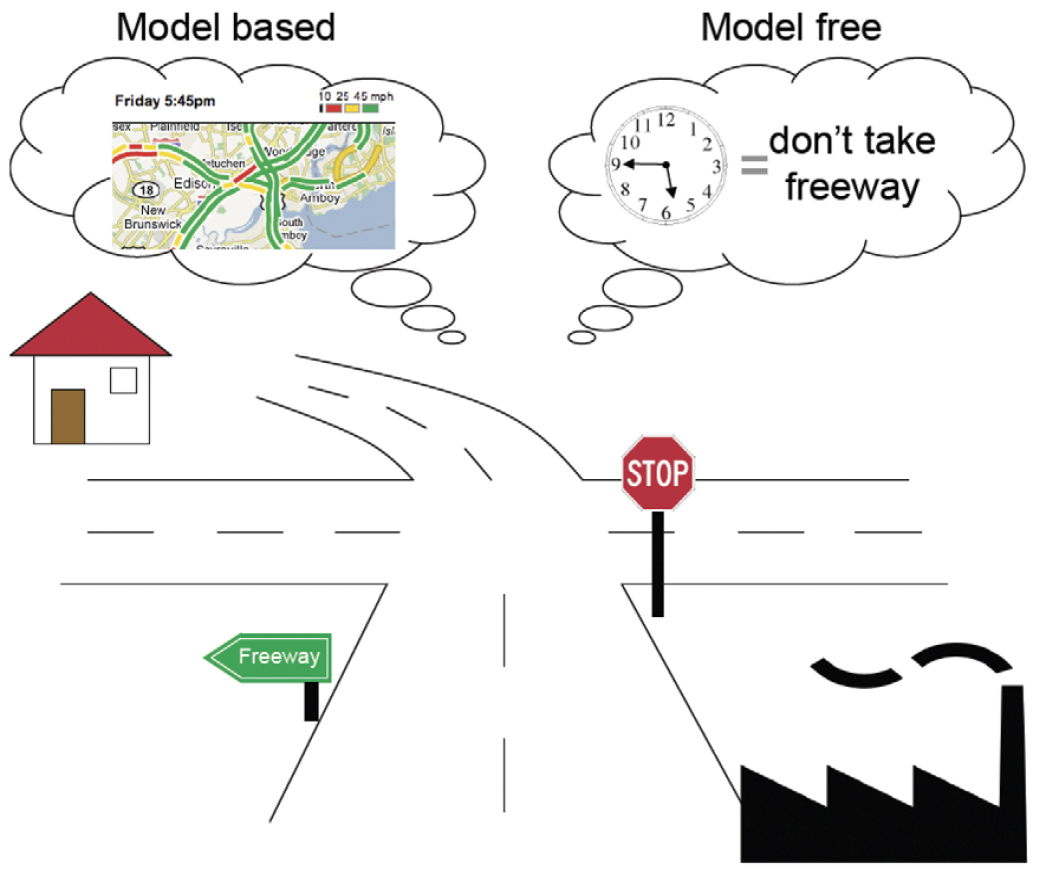 Right:
Right: an illustration of the difference between model-free
and model-based approaches to decision-making.
Model-free vs. model-based RL,
from Theoretical Impediments to Machine Learning With
Seven Sparks from the Causal Revolution (2018) by the great
Judea
Pearl:
"The philosopher Stephen Toulmin (1961) identifies model-based
vs. model-blind dichotomy as the key to understanding the ancient
rivalry between Babylonian and Greek science. According to
Toulmin, the Babylonians astronomers were masters of black-box
prediction, far surpassing their Greek rivals in accuracy and
consistency (Toulmin, 1961, pp. 27–30). Yet Science favored the
creative-speculative strategy of the Greek astronomers which was
wild with metaphysical imagery: circular tubes full of fire, small
holes through which celestial fire was visible as stars, and
hemispherical earth riding on turtle backs. Yet it was this wild
modeling strategy, not Babylonian rigidity, that jolted
Eratosthenes (276-194 BC) to perform one of the
most creative experiments in the ancient world and measure the
radius of the earth. This would never have occurred to a
Babylonian curve-fitter."
types of operant learning (Shteingart & Loewenstein, 2014)
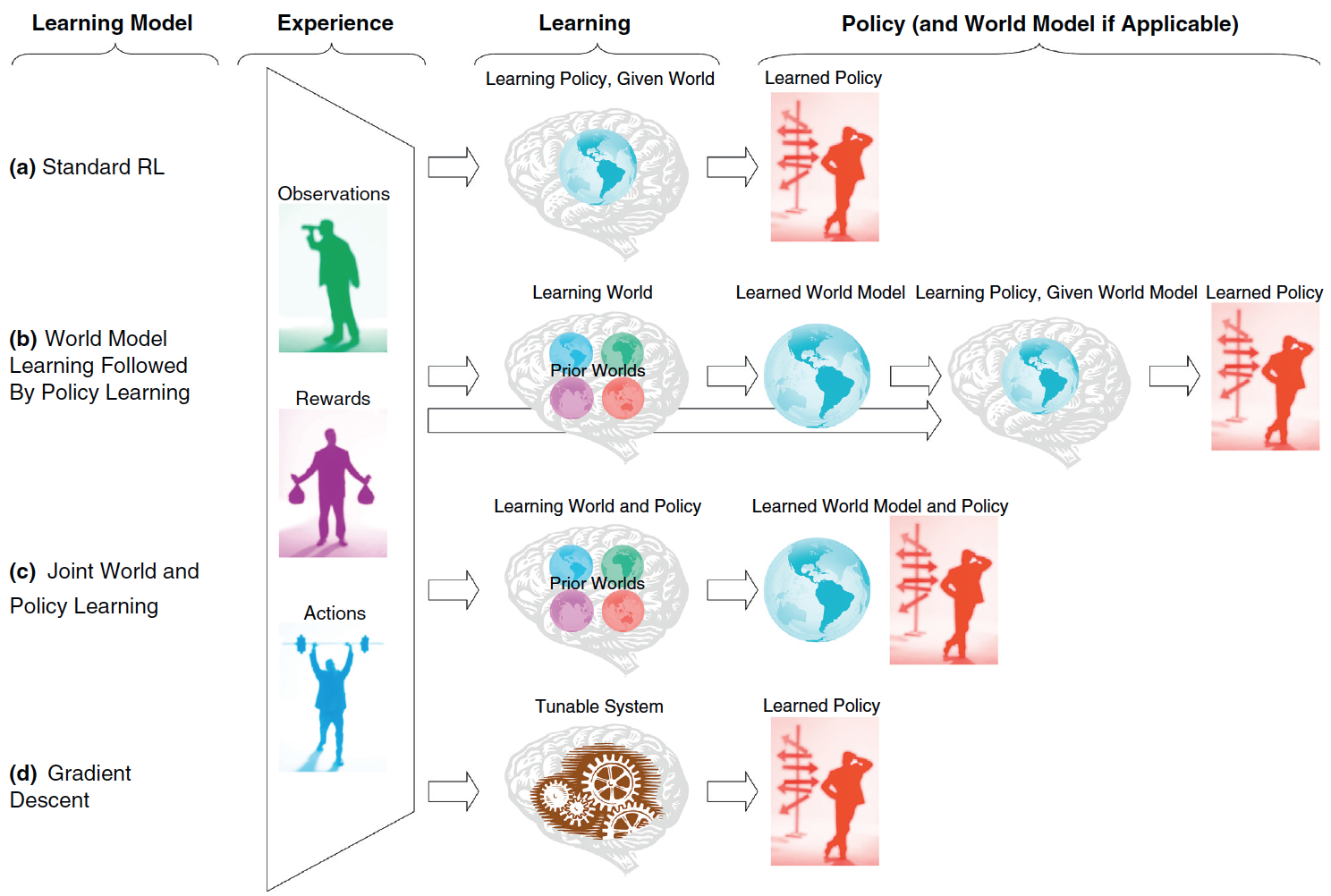
In operant learning, experience (left trapezoid), composed of
present and past observations, actions and rewards, is used to learn a
"policy".
(a)
Standard RL models typically assume that the learner (brain gray icon) has
access to the relevant states and actions set (represented by a bluish
world icon) before the learning of the policy. Alternative suggestions are
that the state and action sets are learned from experience and from prior
expectations (different world icons) before (b) or in parallel
(c) to the learning of the policy. (d) Alternatively, the
agent may directly learn without an explicit representation of states and
actions, but rather by tuning a parametric policy (cog wheels icon), for
example, using stochastic gradient methods on this policy’s parameters.
reinforcement learning: the MDP formulation and link to algorithms
The best studied case is when RL can be formulated as a class of Markov Decision Problems
(MDP).
The agent can visit a finite number of states \(S_i\). In visiting a
state, it collects a numerical reward \(R_i\), where negative numbers may
represent punishments. Each state has a changeable value \(V_i\) attached
to it. From every state there are subsequent states that can
be reached by means of actions \(A_{ij}\). The value \(V_i\) of a state
\(S_i\) is defined by the averaged future reward \(\tilde{R}\) which can
be accumulated by selecting actions from this particular state. Actions
are selected according to a policy which can also change. The goal of an RL
algorithm is to select actions that maximize the expected cumulative
reward (the return) of the agent.
[For a useful introduction to RL, MDP, and the basic algorithms, see the Scholarpedia article.]
the agent, the environment, and the nature of reward (Barto, 2013)
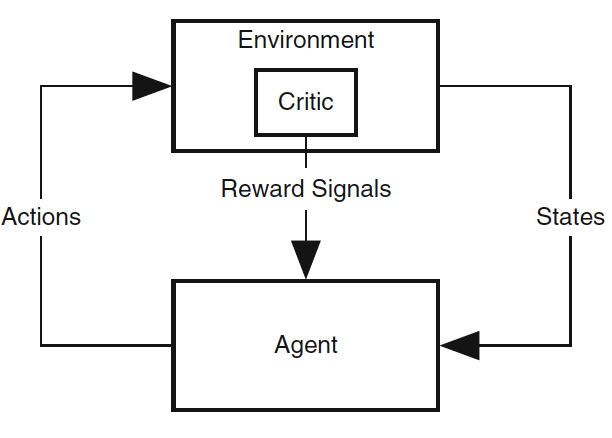
The old/standard view of agent-environment interaction in
RL. Primary reward signals are supplied to the agent from a "critic" in its environment.
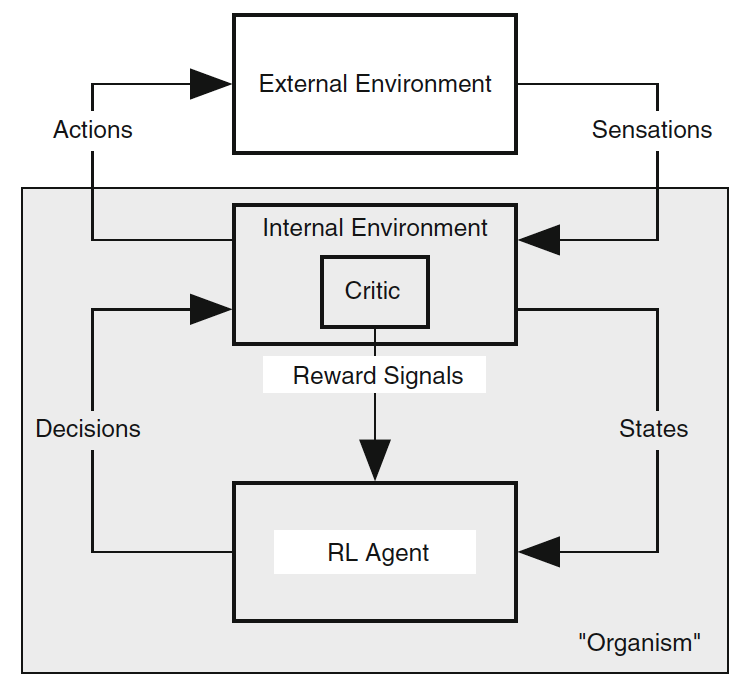
A refined view, in which the environment is divided into an internal and
external environment, with all reward signals coming from the former.
The shaded box corresponds to what we would think of as the
"organism."
With this insight into the nature of the reward, the proper approach to
RL is
intrinsically motivated reinforcement learning.
HIERARCHICAL [model-free] reinforcement learning
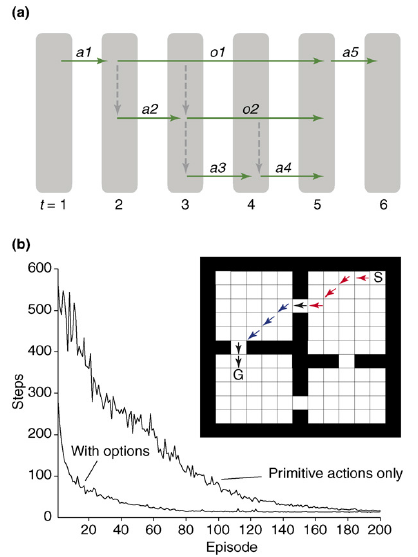
(a) A schematic of action selection in the OPTIONS framework. At
the first time-step, a primitive action, a1, is selected. At time-step
two, an option, o1, is selected, and the policy of this option leads to
selection of a primitive action, a2, followed by selection of another
option, o2. The policy for o2, in turn, selects primitive actions a3 and
a4. The options then terminate, and another primitive action, a5, is
selected at the top-most level.
(b) Inset: the rooms domain (Sutton et al.), as
implemented by Botvinick et al.
S, start; G, goal. Primitive
actions include single-step moves in the eight cardinal
directions. Options contain policies to reach each door. Arrows show a
sample trajectory involving selection of two options (red and blue arrows)
and three primitive actions (black). The plot shows the mean number of
steps required to reach the goal over learning episodes with and without
inclusion of the door options.
HIERARCHICAL [model-based] reinforcement learning
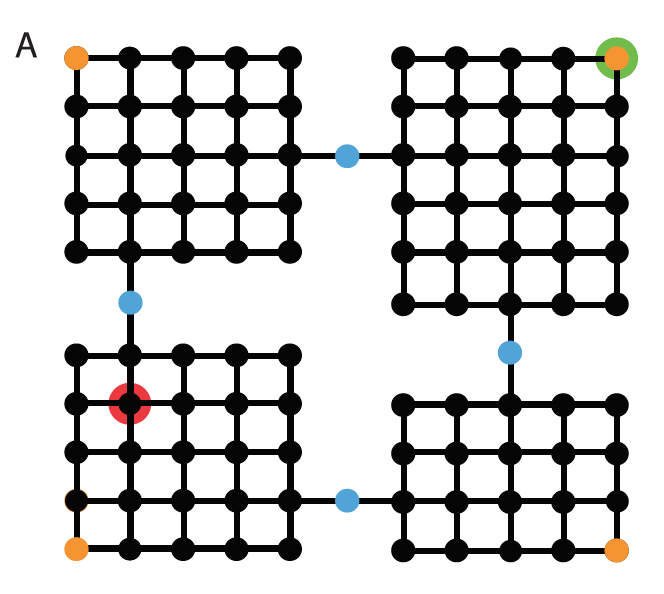
Looking for optimal task hierarchy:
"Arranging actions hierarchically has well established benefits,
allowing behaviors to be represented efficiently by the brain, and
allowing solutions to new tasks to be discovered easily. However,
these payoffs depend on the particular way in which actions are
organized into a hierarchy, the specific way in which tasks are
carved up into subtasks. We provide a mathematical account for
what makes some hierarchies better than others, an account that
allows an optimal hierarchy to be identified for any set of
tasks. We then present results from four behavioral experiments,
suggesting that human learners spontaneously discover optimal
action hierarchies."
— Optimal Behavioral Hierarchy (2014), by Alec Solway,
Carlos Diuk, Natalia Córdova, Debbie Yee, Andrew
G. Barto, Yael Niv, and Matthew M. Botvinick.
(
A). Rooms domain. Vertices represent states
(
green = start,
red =
goal), and edges feasible transitions.
[EXTRA] optimal behavioral hierarchy (Solway et al. 2014)
"The optimal hierarchy is one that best facilitates
adaptive behavior in the face of new problems. [...] This
notion can be made precise using the framework of
Bayesian model
selection. [...] The agent is assumed to occupy a world in which it
will be faced with a specific set of tasks in an unpredictable
order, and the objective is to find a hierarchical representation
that will beget the best performance on average across this set of
tasks. An important aspect of this scenario is that the agent may
reuse subtask policies across tasks (as well as task policies if
tasks recur)."
In Bayesian model selection, each candidate model is assumed
to be associated with a set of parameters \(\theta\), and the fit
between the model and the target data is quantified by the marginal
likelihood or model evidence:
$$
Pr(data\vert model)=\sum_{\theta\in\Theta} Pr(data\vert model,\theta)
Pr(\theta\vert model)
$$
where \(\Theta\) is the set of feasible model parameterizations
(in the above formula, the likelihood is called
"marginal" because it is marginalized over all possible choices of
\(\theta\)).
[EXTRA] optimal behavioral hierarchy (Solway et al. 2014)
In the present setting, where the models in question are different
possible hierarchies, and the data are a set of target behaviors,
the model evidence becomes:
$$
Pr(behavior\vert hierarchy)=\sum_{\pi\in\Pi} Pr(behavior\vert hierarchy,\pi)
Pr(\pi\vert hierarchy)
$$
where \(\Pi\) is the set of behavioral policies \(\pi\) available to the
candidate agent, given its inventory of subtask representations (this
includes the root policy for each task in the target ensemble, as
well as the policy for each subtask itself).
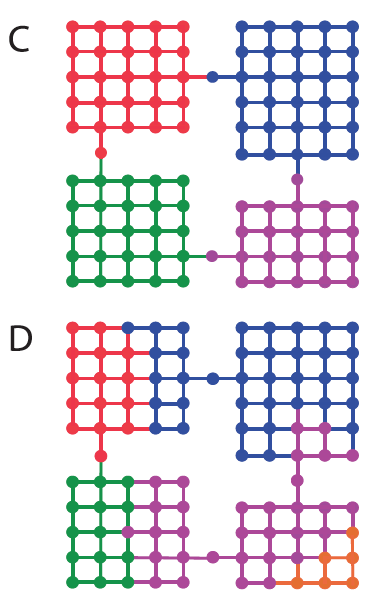
(C). Optimal decomposition. (D). An alternative
decomposition.
[EXTRA] optimal behavioral hierarchy (Solway et al. 2014)
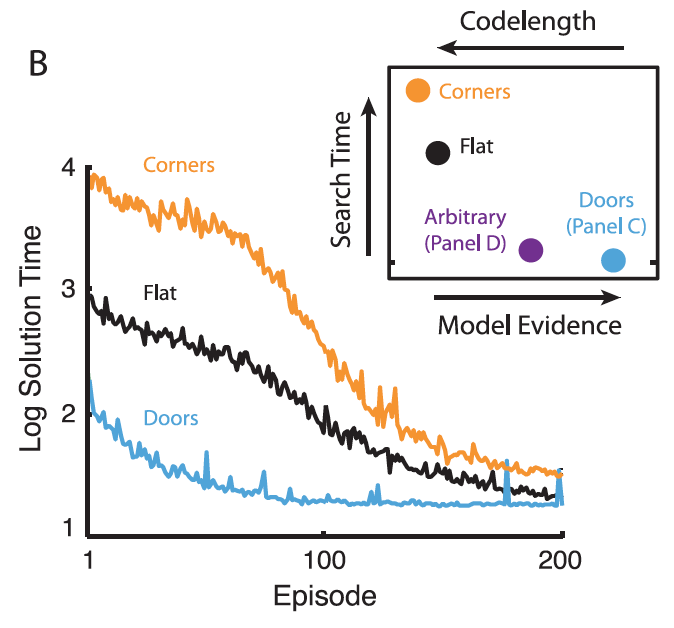
(B). Mean performance of three hierarchical reinforcement
learning agents in the rooms task.
Inset: Results based on four
graph decompositions. Blue: decomposition
from panel C [previous slide]. Purple:
decomposition from panel D. Black: entire graph treated as one
region. Orange: decomposition with orange
vertices in panel A segregated out as singleton regions.
Model evidence is on a log
scale (data range \( -7.00 \times 10^4\) to \( -1.19 \times
10^5\)). Search time
denotes the expected number of trial-and-error attempts to discover
the solution to a randomly drawn task or subtask (geometric mean;
range 685 to 65947; tick mark indicates the
origin). Codelength
signifies the number of bits required to encode the entire data-set
under a Shannon code (range \(1.01\times 10^5\) to
\(1.72\times 10^5\)). Note that the abscissa refers both to model
evidence and codelength. Model evidence increases left to right, and
codelength increases right to left.
[EXTRA] optimal behavioral hierarchy (Solway et al. 2014)
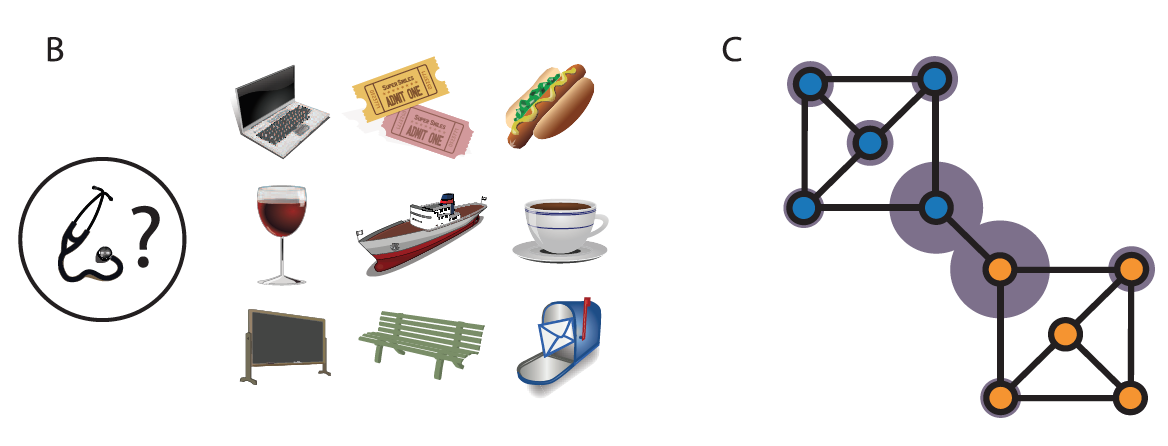
(B). Task display from Experiment 1. Participants used the
computer mouse to select three locations adjacent to the probe
location.
(C). Graph employed in Experiment 1, showing the optimal
decomposition. Width of each gray ring indicates mean proportion of
cases in which the relevant [bus
stop*] location was chosen.
*
Following this training period, participants were informed that
they would next be asked to navigate through the town in order to
make a series of deliveries between randomly selected locations,
receiving a payment for each delivery that rewarded use of the
fewest possible steps. Before making any deliveries, however,
participants were asked to choose the position for a ‘‘bus stop’’
within the town. Instructions indicated that, during the subsequent
deliveries, participants would be able to ‘‘take a ride’’ to the bus
stop’s location from anywhere in the town, potentially saving steps
and thereby increasing payments. Participants were asked to
identify three locations as their first-, second- and third-choice busstop
sites.
[EXTRA] optimal behavioral hierarchy (Solway et al. 2014)
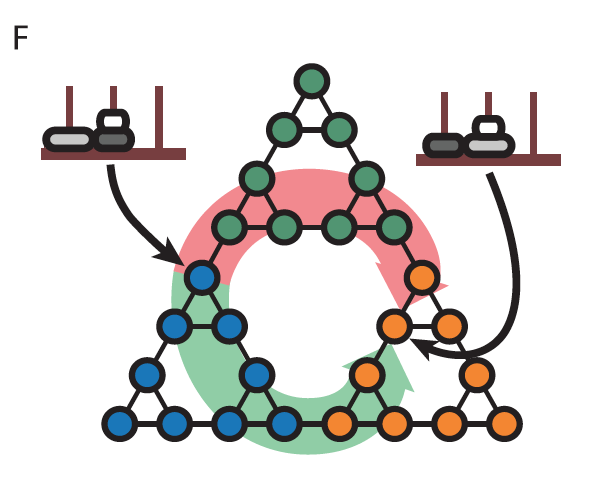
(F). State-transition graph for the Tower of Hanoi
puzzle, showing the optimal decomposition and indicating the
start and goal configurations of the kind studied in Experiment
4.